Proposal: a testable haptic theory of the functional anatomy of the human sensory motor Markov blanket, focusing on proprioception. This is major advance in active inference theory.
The integrative kinesiological functions of the proprioceptive sensory motor system are the basis of biomechanical active inference.
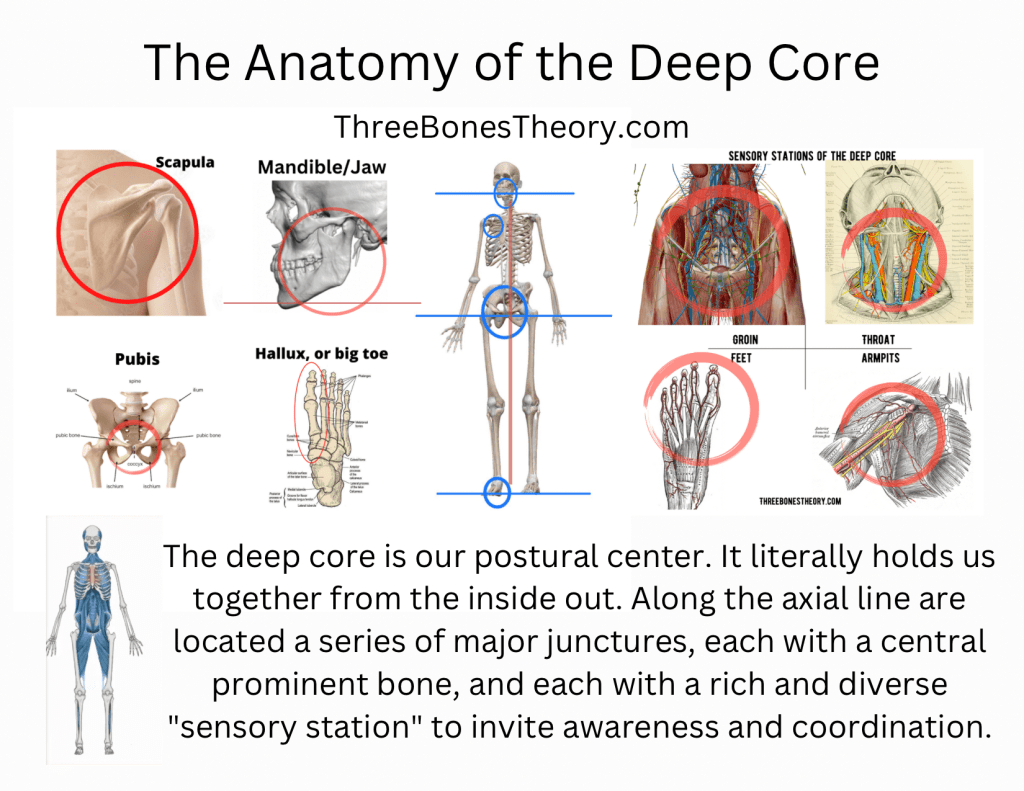
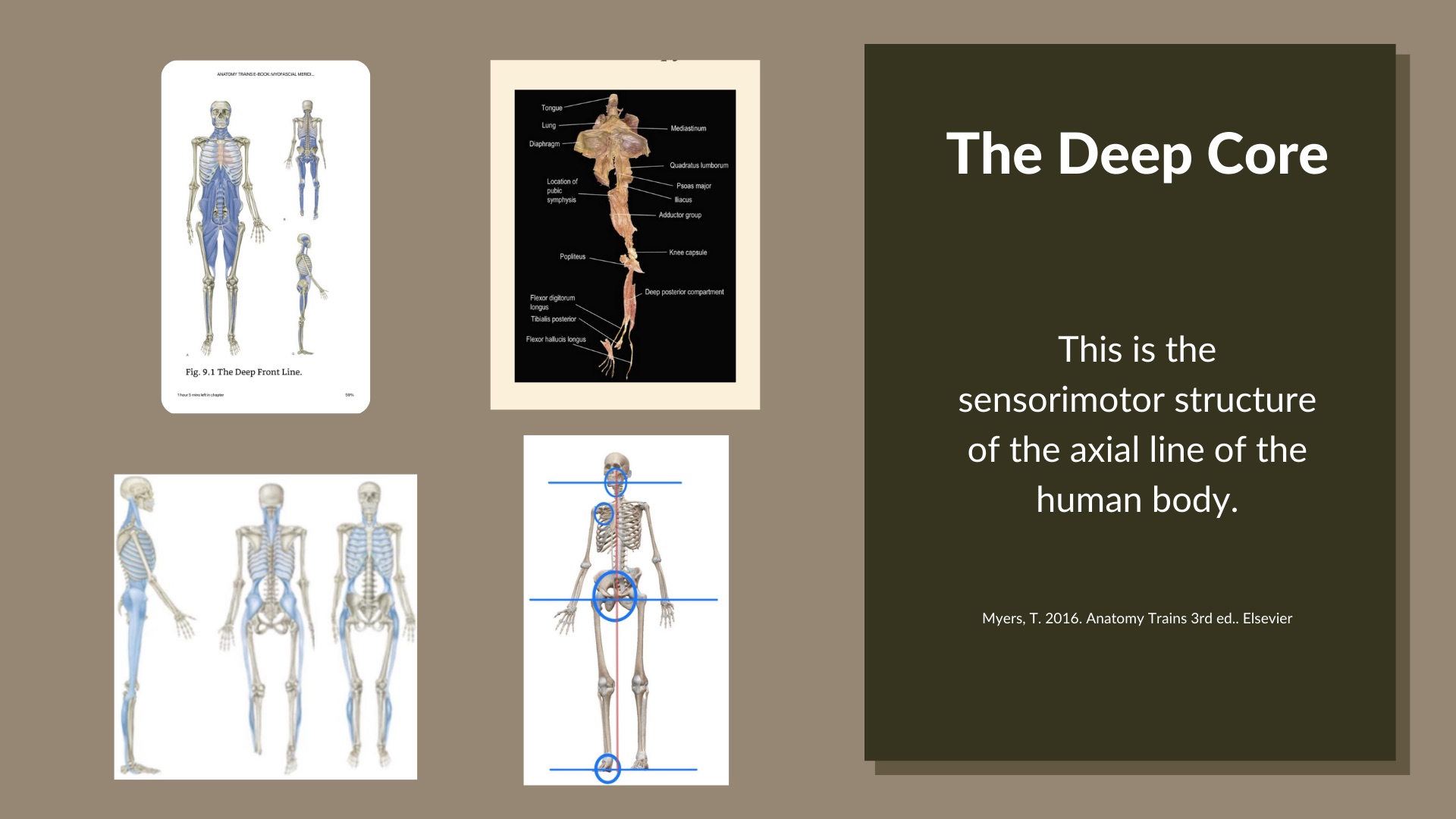
The postural system of the body can be specified accurately biomechanically and is seen to have a limited but rich repertoire of basic functions shared across a coherent bodywide myofascial system. These functions are dictated by the essentially homeostatic role of this inner system so much so that they are seemingly designed as an excellent functional example of active inference. Moreover the system has everything it needs for a high level of agency and self awareness.
The motor function of proprioception is postural: it is self-balancing, self-stabilizing, grounding and accomplishes all the integrative biomechanical and biopsychosocial functions we associate with tensegrity. Knowledge of this system allows us to perceive the Markov blanket of the human body. This is the anatomy of its essential yin component. After Sherrington (1906) we clearly distinguish on a fundamental level this deep inner-directed proprioceptive system from the outward directed exteroceptive system, with its associated superficial and dynamic (extremity based) motor function. Here we have the basic functional terms of the human sensory motor Markov blanket: its proprioceptive and exteroceptive anatomy.
By the simple addition of these inner biomechanics to the notion of a Markov blanket in active inference theory, we suddenly have a much more detailed and workable understanding of the mechanical, sensory motor substrate of the homeostatic function assigned to free energy theory. The new discovery of this deep inner synergistic body part has profound consequences for our grasp of active inference.

Leave a Reply